 Minotauromaquia
Minotauromaquia
Du hast einen Clawbot gebaut, aber es tut nichts, weil du es nicht programmiert hast. Diese Seite wird Sie Schritt für Schritt durch die Programmierung Ihres Clawbot führen.
Schritte
- 1
 Holen Sie sich die Programmierumgebung. Sie können RobotC hier kostenlos herunterladen: http://www.robotc.net/download/vexrobotics/
Holen Sie sich die Programmierumgebung. Sie können RobotC hier kostenlos herunterladen: http://www.robotc.net/download/vexrobotics/ -
 2 Erstellen Sie ein neues Bit des Codes. Gehe zu Datei / Neu / Neue Datei. Sie können auch eine "Wettbewerbsvorlage" verwenden, wenn Sie diesen Code in einem Wettbewerb verwenden möchten. Aber wenn Sie nur Ihren Roboter testen, funktioniert 'Neue Datei'.
2 Erstellen Sie ein neues Bit des Codes. Gehe zu Datei / Neu / Neue Datei. Sie können auch eine "Wettbewerbsvorlage" verwenden, wenn Sie diesen Code in einem Wettbewerb verwenden möchten. Aber wenn Sie nur Ihren Roboter testen, funktioniert 'Neue Datei'. -
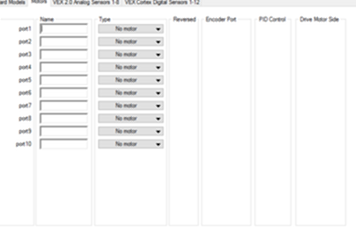 3 Richten Sie die Motoren ein. Rufen Sie die Seite für die Konfiguration von Motoren und Sensoren auf (Roboter / Motoren und Sensoren). Wenn die Box erscheint, geben Sie Ihren Motornamen (alles, was Sie wollen, aber bleiben Sie mit Dingen wie vorne rechts und Lift) in die entsprechende Port-Nummer. Verwenden Sie das Dropdown auf der rechten Seite, um den Motortyp auszuwählen, den Sie verwenden, und prüfen Sie, ob Sie es umgekehrt haben müssen oder nicht. Sie können versuchen und versuchen, herauszufinden, ob es umgekehrt werden muss oder nicht.
3 Richten Sie die Motoren ein. Rufen Sie die Seite für die Konfiguration von Motoren und Sensoren auf (Roboter / Motoren und Sensoren). Wenn die Box erscheint, geben Sie Ihren Motornamen (alles, was Sie wollen, aber bleiben Sie mit Dingen wie vorne rechts und Lift) in die entsprechende Port-Nummer. Verwenden Sie das Dropdown auf der rechten Seite, um den Motortyp auszuwählen, den Sie verwenden, und prüfen Sie, ob Sie es umgekehrt haben müssen oder nicht. Sie können versuchen und versuchen, herauszufinden, ob es umgekehrt werden muss oder nicht. - 4 Codieren Sie die While-Schleife. Sie sollten sicherstellen, dass der gesamte Code zur Steuerung Ihrer Motoren in einer Art unendlicher While-Schleife enthalten ist. Dadurch wird Ihr Programm reibungslos ausgeführt, da ständig überprüft wird, ob der Controller einen Motor zum Bewegen anfordert.
Hauptaufgabe() während(1==1)
- 5 Codieren Sie die Räder. Wenn Sie vier Motoren für Ihre Räder haben, können Sie Ihre Motoren auf jeder Seite aufstellen. Der Code sieht so aus:
Motor-[linksF] = Ärgern[Ch3]; Motor-[linksB] = Ärgern[Ch3]; Motor-[rechts] = Ärgern[Ch2]; Motor-[rechtsB] = Ärgern[Ch2];
Dies nimmt einen bestimmten Motor und weist ihn einem Kanal zu; in diesem Fall entweder 3 oder 2. Dies sind die y-Achsen auf den Joysticks. Der Code nimmt automatisch die Position des Joysticks ein und gibt den Rädern eine geeignete Drehzahl (Umdrehungen pro Minute). - 6 Code den Aufzug. Dadurch wird der Arm angehoben und abgesenkt, auf dem sich die Klaue befindet.
ob(Ärgern[Btn5U]==1) Motor-[Aufzug]=127; sonst ob(Ärgern[Btn5D]==1) Motor-[Aufzug]=-127; sonst Motor-[Aufzug]=0;
Es wird gesagt: Wenn Btn5U gedrückt gehalten wird, den Motor mit einer Drehzahl von 127 U / min vorwärts (im Uhrzeigersinn) drehen. Dann - Wenn dies nicht geschieht, wird Btn5D gedrückt, wenn das der Fall ist, dann drehen Sie den Motor rückwärts (gegen den Uhrzeigersinn). Wenn dies nicht geschieht, drehen Sie den Motor überhaupt nicht. - 7 Fügen Sie den Klauencode hinzu.
ob(Ärgern[Btn5U]==1) Motor-[Aufzug]=127; sonst ob(Ärgern[Btn5D]==1) Motor-[Aufzug]=-127; sonst Motor-[Aufzug]=0;
Dieser Code sieht dem Lift-Code sehr ähnlich, aber anstelle von Btn5U und Btn5D verwendet er Btn6U und Btn6D. Dies bedeutet, dass Sie auf Ihrem Controller einen anderen Satz von Tasten für den Lift und die Klaue verwenden. Der andere Unterschied besteht darin, dass dieses Codebit die Motorklaue und nicht den Motorhub aktiviert. -
 8 Testen und passen Sie Ihren neuen Code an. Nachdem du deinen Code fertiggestellt hast, kompiliere ihn und lade ihn auf deinen Clawbot herunter (Windows - F5).
8 Testen und passen Sie Ihren neuen Code an. Nachdem du deinen Code fertiggestellt hast, kompiliere ihn und lade ihn auf deinen Clawbot herunter (Windows - F5). - Sie können die Tasten ändern, die die Motoren aktivieren und die Drehzahl der Motoren ändern. Die schnellsten 393-Motoren können mit 127 U / min betrieben werden.
- 9 Fühlen Sie sich frei, mit dem Code herumzuspielen und herauszufinden, was für Sie funktioniert. Es gibt andere Möglichkeiten, dasselbe mit robotC zu erreichen, aber das Obenstehende ist am einfachsten zu erstellen und zu verstehen.
 Holen Sie sich die Programmierumgebung. Sie können RobotC hier kostenlos herunterladen: http://www.robotc.net/download/vexrobotics/
Holen Sie sich die Programmierumgebung. Sie können RobotC hier kostenlos herunterladen: http://www.robotc.net/download/vexrobotics/  2 Erstellen Sie ein neues Bit des Codes. Gehe zu Datei / Neu / Neue Datei. Sie können auch eine "Wettbewerbsvorlage" verwenden, wenn Sie diesen Code in einem Wettbewerb verwenden möchten. Aber wenn Sie nur Ihren Roboter testen, funktioniert 'Neue Datei'.
2 Erstellen Sie ein neues Bit des Codes. Gehe zu Datei / Neu / Neue Datei. Sie können auch eine "Wettbewerbsvorlage" verwenden, wenn Sie diesen Code in einem Wettbewerb verwenden möchten. Aber wenn Sie nur Ihren Roboter testen, funktioniert 'Neue Datei'.  3 Richten Sie die Motoren ein. Rufen Sie die Seite für die Konfiguration von Motoren und Sensoren auf (Roboter / Motoren und Sensoren). Wenn die Box erscheint, geben Sie Ihren Motornamen (alles, was Sie wollen, aber bleiben Sie mit Dingen wie vorne rechts und Lift) in die entsprechende Port-Nummer. Verwenden Sie das Dropdown auf der rechten Seite, um den Motortyp auszuwählen, den Sie verwenden, und prüfen Sie, ob Sie es umgekehrt haben müssen oder nicht. Sie können versuchen und versuchen, herauszufinden, ob es umgekehrt werden muss oder nicht.
3 Richten Sie die Motoren ein. Rufen Sie die Seite für die Konfiguration von Motoren und Sensoren auf (Roboter / Motoren und Sensoren). Wenn die Box erscheint, geben Sie Ihren Motornamen (alles, was Sie wollen, aber bleiben Sie mit Dingen wie vorne rechts und Lift) in die entsprechende Port-Nummer. Verwenden Sie das Dropdown auf der rechten Seite, um den Motortyp auszuwählen, den Sie verwenden, und prüfen Sie, ob Sie es umgekehrt haben müssen oder nicht. Sie können versuchen und versuchen, herauszufinden, ob es umgekehrt werden muss oder nicht.  8 Testen und passen Sie Ihren neuen Code an. Nachdem du deinen Code fertiggestellt hast, kompiliere ihn und lade ihn auf deinen Clawbot herunter (Windows - F5).
8 Testen und passen Sie Ihren neuen Code an. Nachdem du deinen Code fertiggestellt hast, kompiliere ihn und lade ihn auf deinen Clawbot herunter (Windows - F5). Facebook
Twitter
Google+